미항공우주국 나사(NASA) 산하 제트추진연구소(JPL)와 앤트로픽(Anthropic)이 협력해 화성 탐사선 이동 경로를 AI로 도출하는 실험을 실시했다. 실험은 성공했으며 실제로 클로드가 도출한 루트에 따라 화성 탐사선 퍼서비어런스가 합계 456미터를 주행했다.
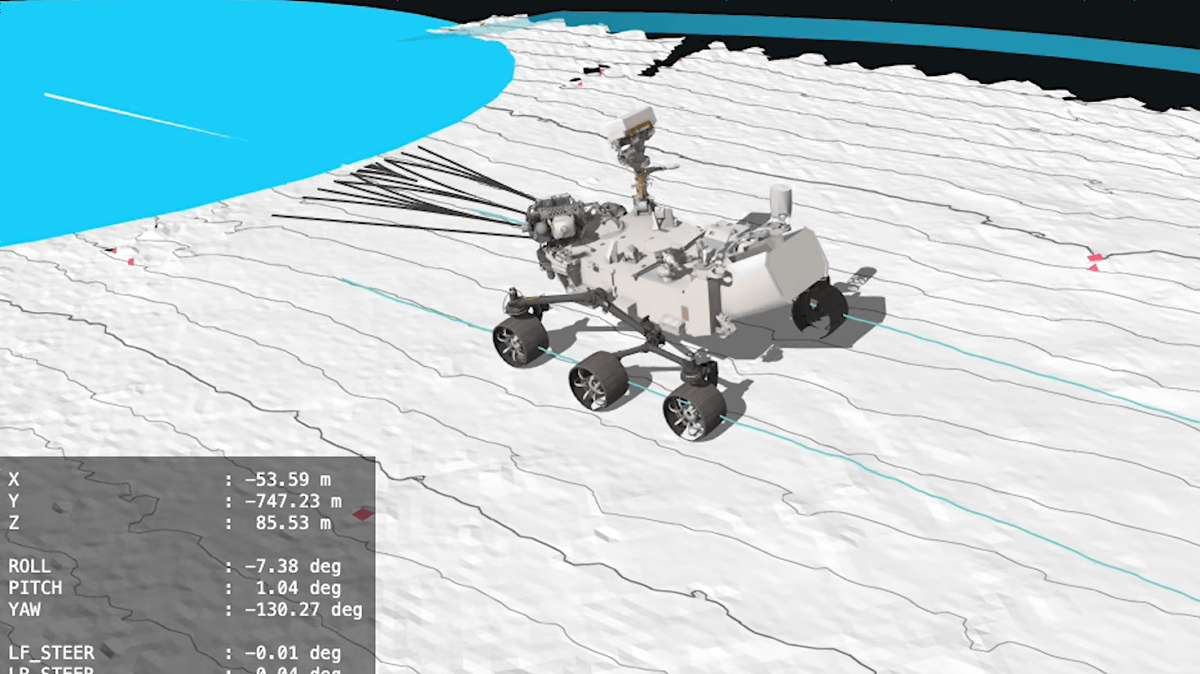
퍼서비어런스는 대량 카메라와 센서를 탑재한 화성 탐사선으로 2021년 2월 화성에 착륙한 이후 화성 지표를 이동하며 데이터를 수집하고 있다. 화성은 지구로부터 2,250만km 떨어진 위치에 있기 때문에 라디오 조종처럼 실시간으로 조작하는 건 불가능하다. 이 때문에 퍼서비어런스를 주행시키려면 지구에 있는 전문가가 지형 데이터 등을 바탕으로 이동 경로를 미리 결정해둘 필요가 있다. 경로를 결정하면 100m 이내 간격으로 웨이포인트를 지정하고 퍼서비어런스가 웨이포인트 사이를 자동 조종으로 주행하는 구조다.
웨이포인트 지정은 어려운 작업이다. 예를 들어 2009년에는 화성 탐사선 스피릿이 웨이포인트를 따라 주행한 결과 모래에 바퀴가 빠져 주행 불능이 되어 프로젝트가 종료된 적도 있다. 이번 실험은 웨이포인트 지정에 AI를 활용해 작업 효율화와 어려운 지형에 대한 대응을 가능하게 하는 걸 목적으로 실시됐다.
JPL 기술자는 지금까지의 주행 경험에서 얻은 데이터와 지식을 클로드 코드(Claude Code)에 집약한 뒤 화성 지형 데이터와 위성 이미지를 입력했다. 클로드 코드는 입력된 정보를 분석해 위험한 바위, 모래 상황 등 중요한 지형 특성을 특정하고 퍼서비어런스 이동 경로 및 웨이포인트를 생성했다. 더 나아가 생성한 웨이포인트를 바탕으로 퍼서비어런스용 명령 커맨드를 전용 마크업 언어(Rover Markup Language)로 기술했다.
클로드 코드 지시가 퍼서비어런스에 적합한 것인지 검증하기 위해 프로젝트팀은 퍼서비어런스의 디지털 트윈을 사용해 50만 개 이상 변수를 검증했다. 또 인간 기술자가 클로드 코드에는 입력하지 않았던 지표 카메라 이미지를 참고해 명령을 미세 조정한 뒤 실제로 명령이 송신됐다.
AI 지시를 받은 주행은 퍼서비어런스 가동 시작으로부터 1707 화성일과 1709 화성일에 실시됐다. 주행 거리는 1707 화성일이 210m였으며 1709 화성일이 246m였다.
프로젝트팀은 AI를 이동 경로 계획에 활용해 계획에 소요되는 시간이 절반으로 단축될 것으로 추산하고 있다. 앤트로픽 측은 미래에는 AI를 통한 이동 경로 계획이 본격 도입되면 탐사와 데이터 수집에 더 많은 시간을 쏟을 수 있게 된다고 어필하고 있다. 관련 내용은 이곳에서 확인할 수 있다.
![[AI서머리] 대구창경, ‘로봇인의 날’ 성과 공유회 성료‧30분 세로 숏폼 ‘SERO’ 출시](https://startuprecipe.co.kr/wp-content/uploads/2026/02/260205_Daegu-Center-for-Creative-Economy-Innovation_50025-75x75.jpg)















{kind=link}